水中ロボット(ROV)の推進装置は、一般的に回転するプロペラやスクリューを利用しています。これらの回転体が水流を生成し、ロボットを前進させる仕組みです。ROVの性能を向上させるためには、推進装置の回転運動を精密に計測し、最適な設計を行うことが不可欠です。
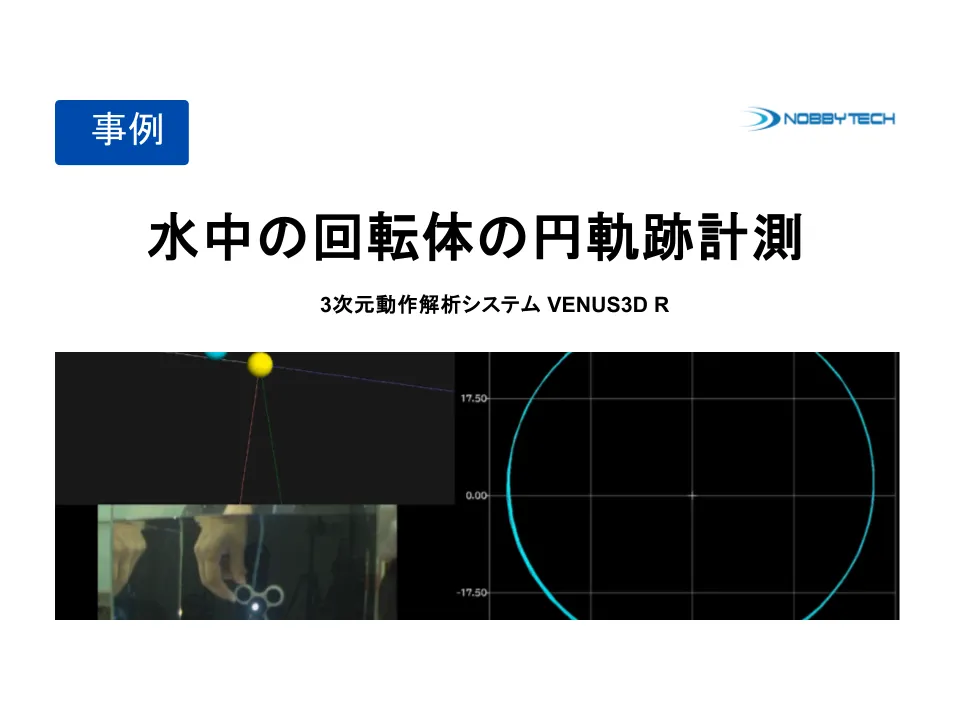
そこで本計測では、回転体に水中用自発光マーカーを取り付けることで、回転運動の円軌跡を可視化しました。
本動画では、ハンドスピナーの中心とブレードの2点にマーカーを取り付け、回転軌跡を計測しました。またVENUS3D Rの機能を用いることで、回転中心に対する円軌跡を計測することが可能です。これにより理想軌跡との差分を分析し、回転軸のずれや動的な挙動を可視化、定量的な評価が可能です。
こちらもあわせてご覧ください「水中運動における物体の3次元姿勢計測」