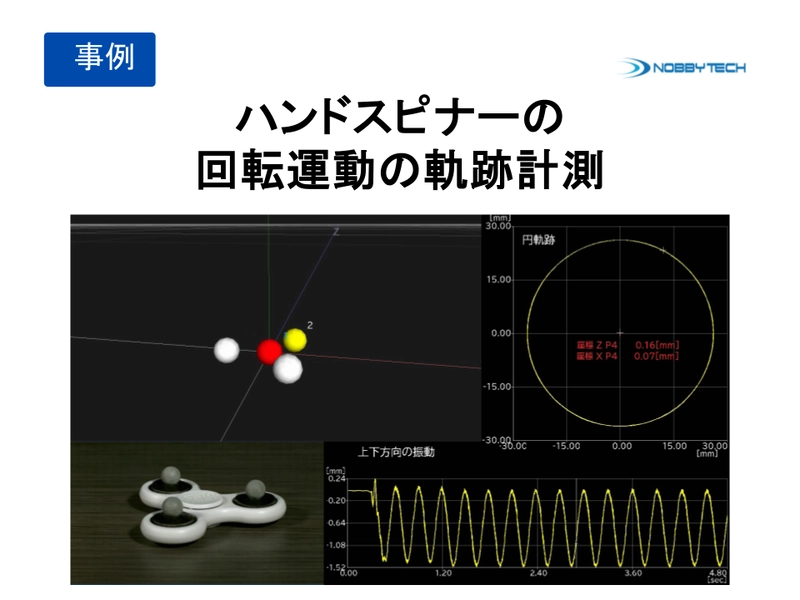
本計測ではハンドスピナーの回転運動を軌跡として可視化しました。また、回転運動の際に発生する上下振動を計測しました。
回転運動の軌跡は、部品の製造精度や製造機器の経年劣化の検査などの品質保証の観点でよく利用されています。
産業用ロボットのアームは各関節の回転運動によって作業位置に移動するため、軌跡にずれが生じた場合、異常検知として認識し不具合の早期発見やトラブルの防止につながります。
今回はカメラ4台を使用し、3点のマーカーをハンドスピナーに取り付けることで回転運動の軌跡と上下振動を計測しました。計測した3点の座標値から回転中心の座標も算出しました。
また回転運動の際に上下振動は1mm程度の振幅の計測をしました。
これは「ジャイロ効果」と呼ばれ、高速で回転する物体が回転軸の向きを保とうとする性質があるからです。
VENUS3D Rではこれらの項目をリアルタイムに確認し、かつワンクリックで解析することができます。また、ミリ単位での計測ができるため高精度なデータが取得が可能です。