これまでのVENUS3D Rの解析項目における数値微分は、「後方差分」という1つの計算パターンに限定されていました。
今回のアップデートでは、数値微分処理アルゴリズムを下記4パターンに拡充いたしました。
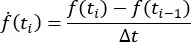
後方差分(従来法)
現在の値と「過去」の値を用いて計算する手法(式1)
メリット
- 未来の値を必要としないため、リアルタイムでの解析が可能です。
- 計算処理による遅延が生じません。
デメリット
- 位相遅れ:過去のデータに基づいて変化量を算出するため、実際の動きに対してグラフがやや遅れて表示されます。
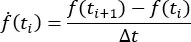
前方差分
現在の値と「未来」の値を用いて計算する手法(式2)
メリット
- 変化を先取りして捉えられるため、立ち上がりの検出などに有効です。
デメリット
- 位相進み:未来のデータに基づいて変化量を算出するため、実際の動きに対してグラフがやや早く表示されます。
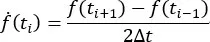
中心差分(迷ったらコレ)
2次精度
現在の値を挟む「前後1フレームずつ(計3点)」の値を用いて計算する手法(式3)
メリット
- 位相ズレがない:時間的に前後対称のため、理論上、時間軸のズレ(位相遅れ・位相進み)は生じません。
デメリット
- 端点の欠損:最初と最後の1フレームでは前後データが揃わないため計算できません。
4次精度
現在の値を挟む「前後2フレームずつ(計5点)」の値を用いて計算する手法(式4)
メリット
- 精度が高い:打切り誤差がΟ(Δt4)と小さく、2次精度と比較してより高精度に計算することができます。
デメリット
- 端点の欠損が大きい:前後2フレームずつ(計4フレーム分)が計算できないため、非常に短い動作の解析には不向きです。
- ノイズに敏感:係数が大きく、高周波ノイズを増幅しやすいため、計算結果に強く影響します。フィルタ処理などにより整理されたデータへの適用が推奨されます。
※リアルタイム計測においては、後方差分のみとなります。
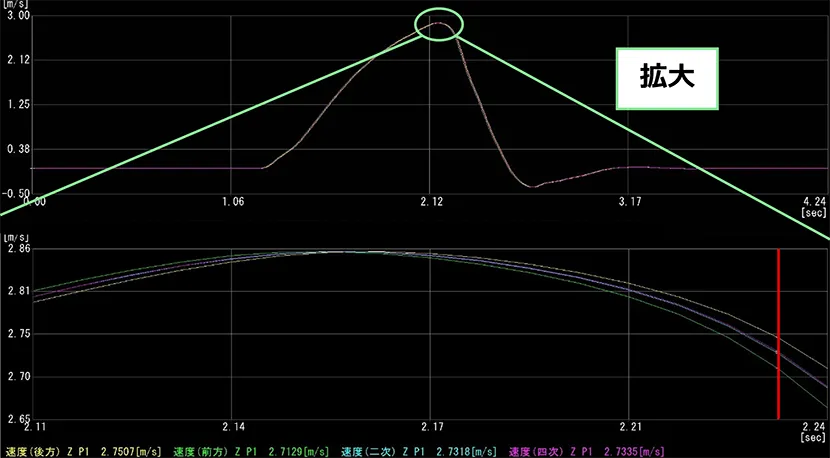
下記の図1、図2は、AGVを模したラジコンカーの急発進・急停止時の挙動を示したものです。
左上に計測した3次元計測点、右上にシーンカメラ映像、下部に4点から剛体認識した中心点の軸方向(進行方向に相当する)速度を示しています。
急発進・急停止
図1:急発進・急停止時における差分手法の違い(全体)
図2:急発進・急停止時における差分手法の違い(速度頂点部分)
図2の下部の赤線は現在時刻を示しており、その時刻における各差分手法で算出された速度を下部に示しています。赤線の位置は急ブレーキ直後に相当するため、
- 前方差分では未来の減速を先取りしているため最も小さな値を示しています。
- 後方差分では過去の高い速度を反映するため最も大きな値を示しています。
- 中心差分および4次精度はその中間の値となります。
このように、数値微分の手法によって同一時刻における速度の解釈が異なるため、用途に応じた選択が重要となります。
使用機材
撮影条件
- マーカ位置座標に対して5Hzのローパスフィルタを適用(VENUS3D R機能)
高速現象の可視化・解析はノビテックにお任せください。
ノビテックでは、高速現象の可視化・解析に最適な動作計測機器、ソフトウェアを取り扱っています。
画像計測ノウハウを持ったスタッフに、ぜひお気軽にご相談ください。