ひずみ解析(DIC)ソフトウェア MercuryRT

Mercuryはデジタルカメラで撮影された変形前後の画像からDIC(デジタル画像相関法)によって非接触でひずみ分布の解析を行うソフトウェアです。
新製品の開発、CAEシミュレーションとの比較、そのほか様々な材料強度の評価試験に最適です。
Mercury MS,s.r.o.社(チェコ)
Mercuryを実際の画面で体験!
Mercuryの優れた機能を、ぜひオンラインデモで体験してください。
登録不要、クリックするだけで体験できます。
ソフトウェアは2D / 3Dをラインナップ
Mercuryには、2Dモジュールと3Dモジュールの2ラインナップがあります。
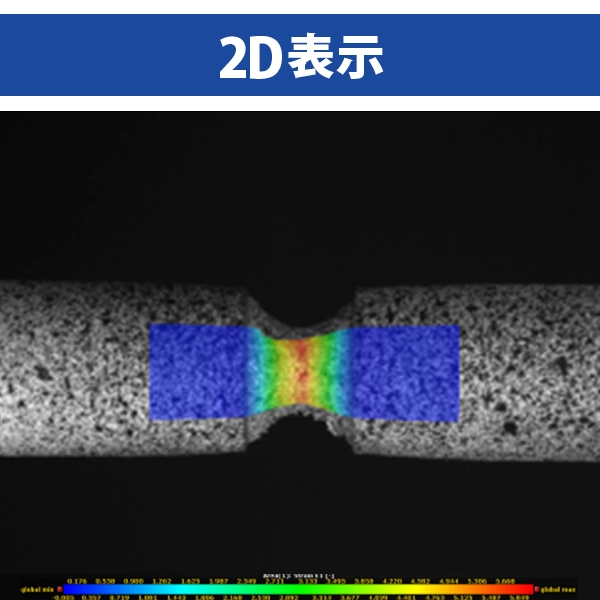
2Dモジュール
Mercuryの2Dモジュールは、平面的な対象物の寸法や変形を測定するために使用されます。これには、長さ、幅、面積などの基本的な測定が含まれます。
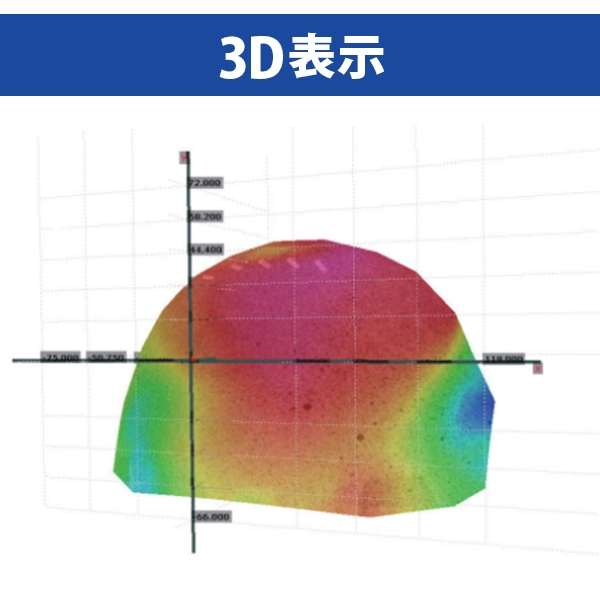
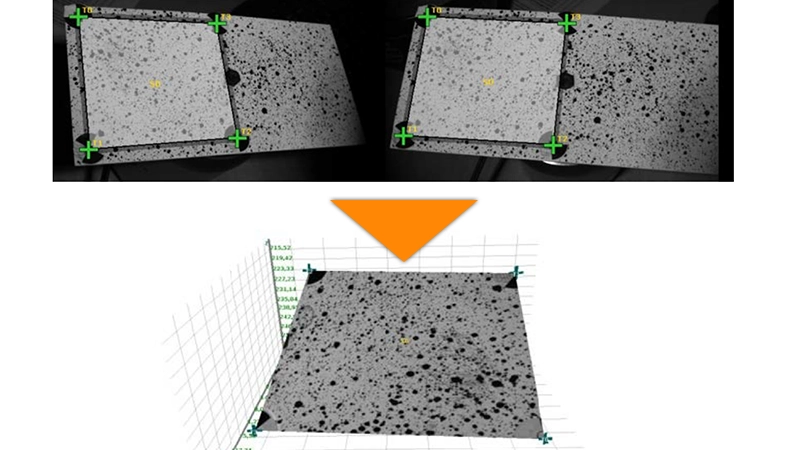
3Dモジュール
【3Dモジュール】
3Dモジュールは、立体的な物体の寸法や変形を測定するために設計されています。これは、立体的な形状や深さの測定、複雑な3次元的変形の分析に特に有効です。
ソフトウェアの主な機能
特長① 豊富な解析機能
Mercuryは各主ひずみに加え、一軸方向ひずみ、せん断、ひずみ速度など様々な解析項目を搭載しています。これによりシミュレーションや理論上の数値と実際の現象の比較が可能です。
| 表見出しを入力してください |
解析項目 |
内容 |
| 表見出しを入力してください |
Displacement[mm] |
変位 |
| 表見出しを入力してください |
Displacement in X[mm] |
変位X |
| 表見出しを入力してください |
Displacement in Y[mm] |
変位Y |
| 表見出しを入力してください |
Strain E1[-] |
最大主ひずみ |
| 表見出しを入力してください |
Strain E2[-] |
最小主ひずみ |
| 表見出しを入力してください |
Strain EXX[-] |
一軸方向ひずみX |
| 表見出しを入力してください |
Strain EYY[-] |
一軸方向ひずみY |
| 表見出しを入力してください |
Strain EXY[-] |
せん断ひずみ |
| 表見出しを入力してください |
Strain E1 Rate[-/s] |
最大主ひずみ速度 |
| 表見出しを入力してください |
Strain E2 Rate[-/s] |
最小主ひずみ速度 |
| 表見出しを入力してください |
StDev[mm] |
標準偏差 |
| 表見出しを入力してください |
StDev in X[mm] |
標準偏差X |
| 表見出しを入力してください |
StDev in Y[mm] |
標準偏差Y |
特長② プローブ機能一覧
Mercuryでは、試料の変形や動きを高精度で計測するために、仮想のプローブを使用することができます。シンプルな2点間距離や、ポアソン比、塑性ひずみ、仮想ひずみゲージなど様々な機能があります。 下記をクリックしてすべてをご覧ください。

Point Probe
2D
3D
選択した点の位置と変位を測定します。

Line Probe
2D
3D
測定試料の2点間の距離(Line Probeの長さ)を測定します。
Chain Probe
2D
3D
Lineを複数セグメントに分割し、伸びが最も高いセグメントデータを計算します。

Force Gauge
2D
3D
時間の経過に伴うForce Gaugeのノビテックと指定された剛体から応力と真応力を計算します。

Neck Gauge
2D
引張試験中に発生するネックを検出できるほか、ポアソン比や塑性ひずみ比を計算します。
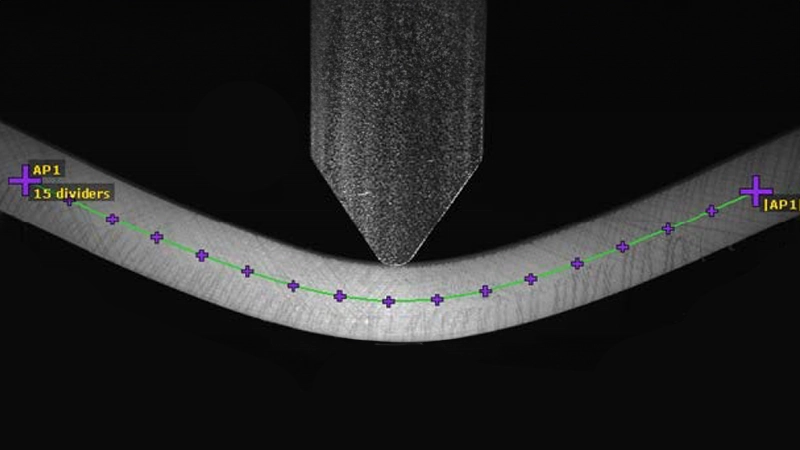
Polyline Probe
2D
3D
変形後の非直線物体の全長を測定し、曲げカンチレバー(片持ち梁)の最大たわみを計算。
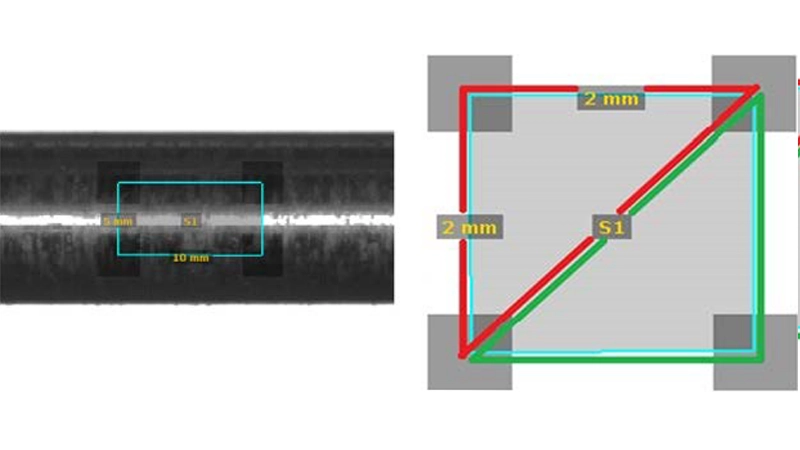
Shear Probe
2D
交差する2線間の角度や、せん断ひずみを計算します。

Rigid Plane Probe
2D
時間経過に伴う座標系の動きを計算します。
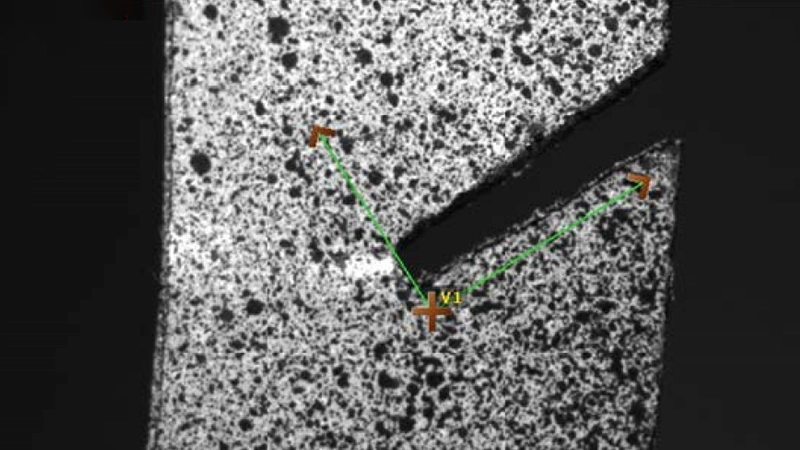
Angle Probe
2D
共有の開始点をもつ2線間の角度や関連する値を計算します。
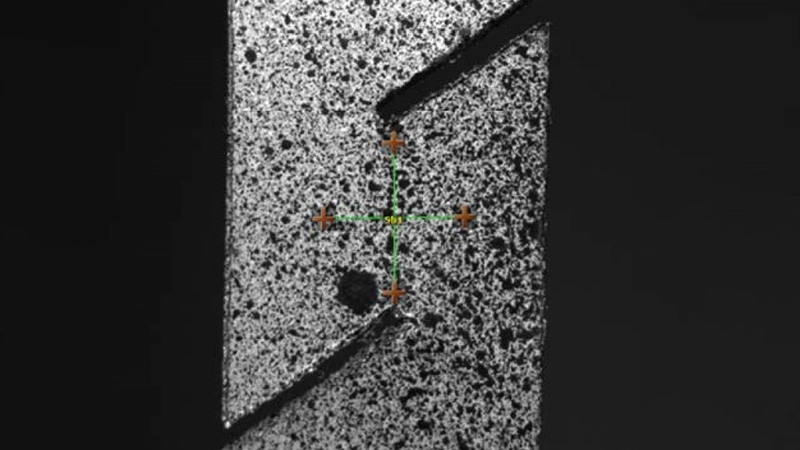
Strain Gauge
2D
仮想ゲージを用いてひずみ(または変形)テンソルおよびポアソン比の評価を行います。
Point Group
3D
測定された標本の回転の変化など、点のグループ全体に関する値を計算します。
Surface
3D
追跡プローブ間の空間関係を視覚化し、3Dビューに視覚情報を追加します。
特長③ ソフトウェア上でカメラ制御
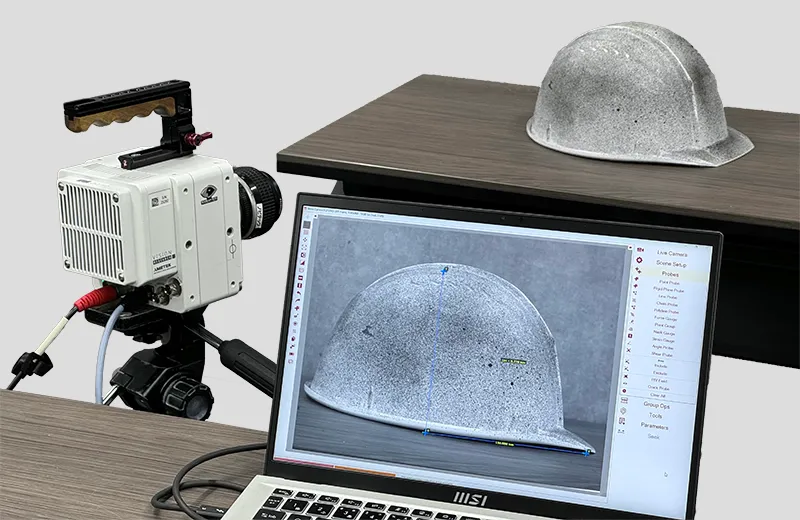
Mercuryは高速度カメラPhantom、各種マシンビジョンカメラの制御に対応しています。
Mercuryのソフトウェアからカメラをコントロールし、撮影から解析までを同一ソフトウェア上で行うことができます。
これにより、ソフトウェアを行き来する手間が省けます。
特長④ リアルタイム計測
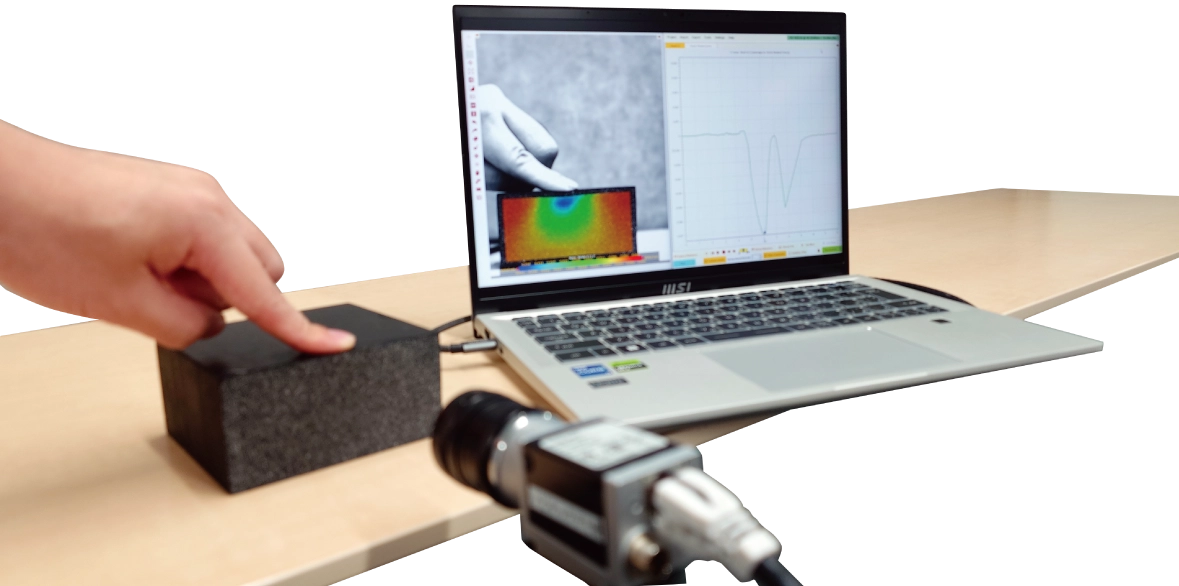
Mercuryのリアルタイム計測機能は、物体や材料の動的な挙動をリアルタイムで捉え、分析するための強力なツールです。この機能は物体の動きや変形を瞬時に計測し、そのデータをリアルタイムで処理・表示します。これにより、材料の応力試験、構造物の振動分析、製品の品質検査など、試験前の相関を確認する事前テストなど多岐にわたる用途での活用が可能になります。
拡張機能
Mercuryでは、ひずみ解析に必要な機能を標準で取り揃えており、お客様の要望に応じて拡張機能を追加購入することが可能です。
VIBROGRAPHY(FFT)

CRACK

FORMSYS

THERMOELASTIC STRESS
ANALYSIS

使いやすさのポイント
Mercuryは、ユーザーが撮影から解析までのプロセスをスムーズに実行できるよう、充実したユーザーアシスト機能を備えています。
高品質な解析機能、優れたユーザーインターフェース
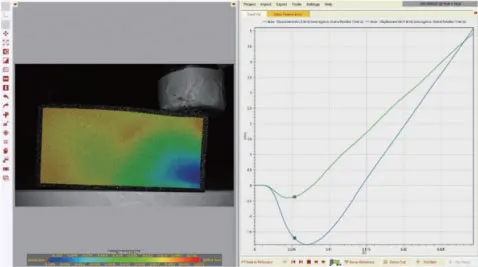
Mercuryは様々な研究、材料試験、製品評価で活用ができる高品質な解析アルゴリズムと、優れたユーザーインターフェースを持ち合わせています。使用者の目的を反映する細かな解析条件の設定や、解析データは足剤に映像とグラフで視覚的に確認が可能です。また解析結果は動画データとして出力が可能なほか、必要なグラフ解析項目を指定しcsvファイルとして出力することも可能です。
フォーカスアシスト
ひずみ解析をするための画像撮影を行う際に、フォーカスが合っているかどうかは計測品質に大きく影響する重要な要素です。この機能を有効にすることでフォーカスが合っている部分は緑色に強調され視覚的にDIC解析に適した画像かどうかを判断することが可能になります。カメラの焦点を正確に合わせることで、画像解析の精度が向上します。
ライブ画像
フォーカスツール有効
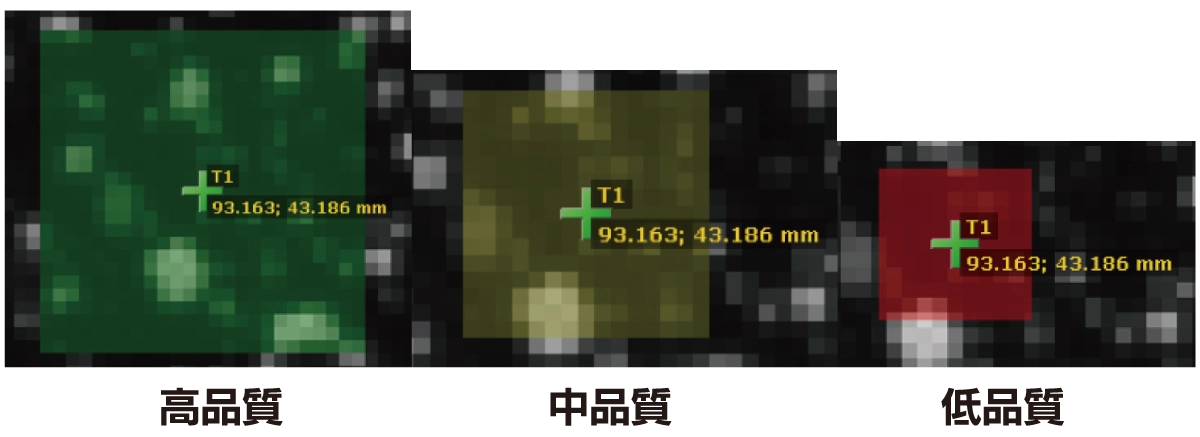
パターン評価
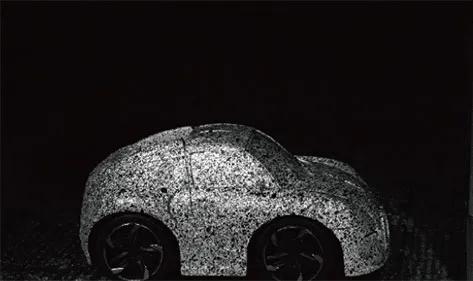
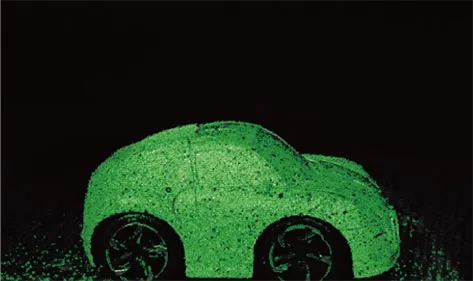
DIC解析では、被測定物の表面に適用されたパターン(通常はスペックルパターン)の品質が測定精度に直接影響します。 パターン評価機能は、測定前にこのパターンの品質を評価し、適切なパターンが適用されているかどうかを確認するために使用されます。
この機能を有効にすることでパターンの品質を視覚的に評価し、高品質(緑)>中品質(黄)>低品質(赤)とランク付けをすることができ、測定開始前にパターンの問題点を特定し、必要に応じて改善することができます。
これにより、測定の再実施を避けることができ、時間とリソースの節約につながります。
この機能を活用することで、ユーザーは専門的な知識がなくても簡単にパターン品質を評価できます。
計測例
その他のDIC事例
システム構成

カメラ
お客様のご要望に応じて選定いたします。
ゆっくり変形するものであれば産業用カメラ、破断や衝突などの高速な現象を計測する場合はハイスピードカメラが必要です。
解像度が高いほど細かく相関を見られるため、精度が高まります。
ひずみ解析ソフトウェア Mercury RT
デジタルカメラで撮影した画像を処理するのがひずみ解析ソフトウェアです。
変形前後の画像を使用しパターン群の変形を捜索、演算解析を行い、ひずみを可視化解析します。
解析したデータはcsv、動画、画像で出力可能です。

解析用PC
ひずみ解析ソフトウェアを動かすPCが必要になります。
【推奨スペック】
CPU:Intel Core i7 以上
メモリ:32GB 以上
グラフィックボード:NVIDIA GeForce GTX1650 4GB 以上
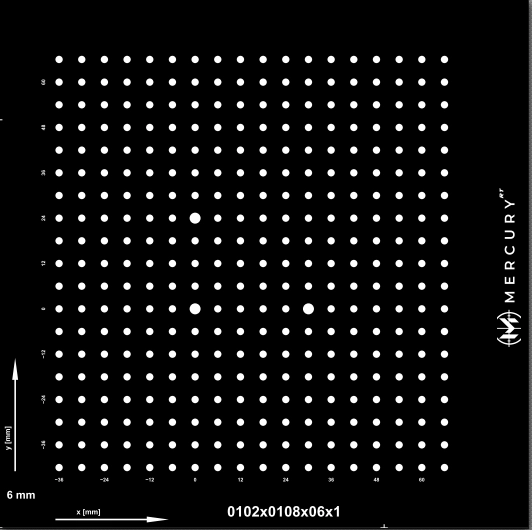
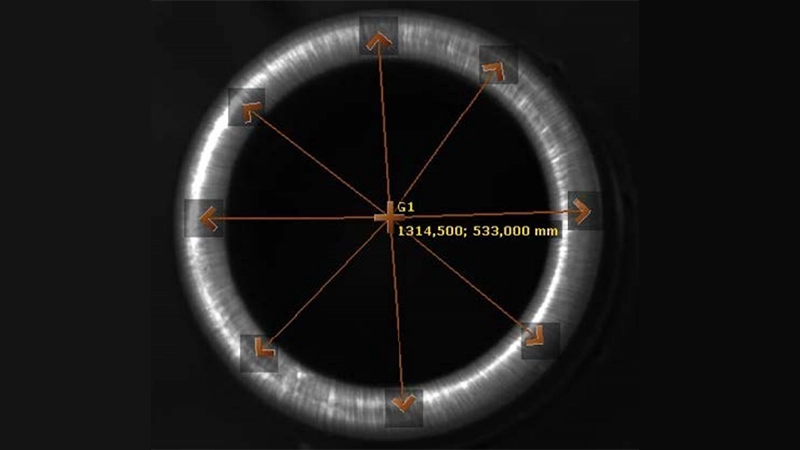
キャリブレータ
高精度な計測を行うためのパターンが描かれたプレートです。
- カメラレンズの歪み補正
- 2D測定の平面におけるピクセルと物理単位(ミリメートル)の設定
- 3D座標系の設定
のために使用します。
撮影領域に合わせて様々なサイズを取り揃えています。
価格
Mercuryソフトウェアは基本パッケージ買い切りです。
価格は予告なく変更される場合がございます。
Mercury RT 2D
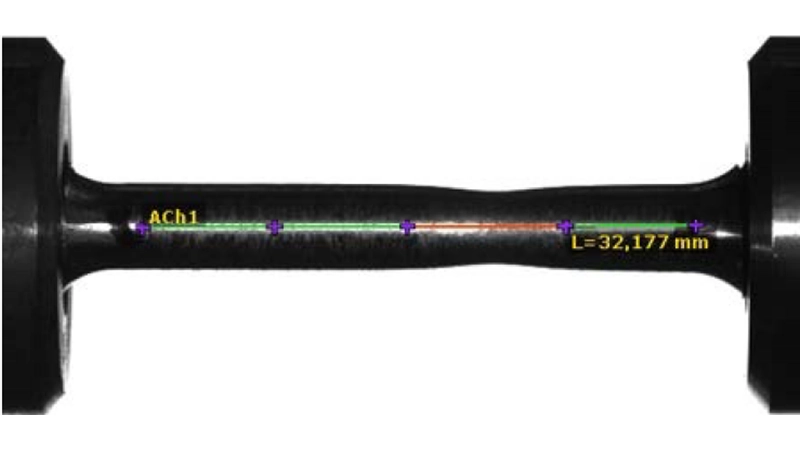
平面の構造物を計測することができます。
カメラ1台を使用するシステムなので、引張試験など平面上のひずみを見る際に最適です。
リアルタイムデータ出力にも対応しています。
※3Dへのアップグレードが可能です
Mercury RT 3D
物体の3次元の変形やひずみを計測することが可能です。曲面を持つ物体や回転体などを撮影する際に必要です。3D版ソフトウェアでは、2D / 3D両方の計測が可能です。
ソフトウェア主仕様
| 解析機能 |
ベクトル表示、カラーマップ表示、各項目のグラフ化、3D表示機能 |
| 再生表示 |
2次元オーバーレイ、3次元オーバーレイ、3次元アニメーション動画(360度回転可能) |
| 読み込み可能ファイル |
cine、avi、mp4、mov、BMP、TIFF、JPG |
| データ出力 |
csv、avi、JPG、BMP、PNG |
| Phantom Cine ファイル対応 |
PhantomオリジナルRawファイル「.cine」に対応しています。汎用フォーマットに変換することなく、解析を行うことが可能です。 |
| 制御対応カメラ |
Phantom、Basler、IDS、Ximea |
MERCURY RT バージョン履歴
これまでのMERCURY RTのバージョン履歴は以下となります。
インストーラーの送付やアップデートをご希望のお客様は、サポートにご連絡ください。
Ver 3.2.1
2026-06-07 |
主な更新内容
【追加】
- High Speed Capture Toolでライブプレビューを表示する機能を追加
- カメラのシャッタースピードをマイクロ秒単位で設定する機能を追加
- Area Section DataをCSVファイルへエクスポートする機能を追加
- Areaを長方形として定義する機能を追加
- 画像のピクセル座標を表示する機能を追加
【変更】
- Phantomカメラの初期化時に、カメラ設定を変更しない仕様に変更
- Areaデータを複数のVTKファイルへエクスポートできるように変更
【修正】
- 日本語および中国語の翻訳を修正
- AMEE 3D VEXライセンスでカメラトリガー設定が表示されない問題を修正
- 一部のWindows環境でvcredist C++(v14)が不足している場合にクラッシュする問題を修正
|
Ver 3.2.0
2026-04-27 |
主な更新内容
【追加】
- DICメソッドとして、Standard、Illumination robust、Fully robustを追加
- FLIRサーマルカメラへの対応を追加
- 演算時に使用するCPUコア数の上限設定を追加
- 検出設定として、エッジ検出または相関による検出を選択できる機能を追加
- Merged CamerasビューにFocus Toolを追加
【変更】
- OpenCVライブラリをVer 4.12.0へ更新し、演算速度を2〜3倍高速化
【修正】
- Analog Outputサービスを設定するメニューが表示されない問題を修正
- USB Relay通信時の例外を修正
- 日本語翻訳を修正
- Axial Probeが失われた際にNeck Probeのデータも失われる問題を修正
- Area Probeのコンテキストメニューが表示されない問題を修正
- Merged Camerasビューの座標系読み込みエラーを修正
- Merged Camerasビューのツールバーデザインを修正
|
Ver 3.1.22
2025-10-25 |
主な更新内容
【変更】
- Phantomカメラ用ドライバーをVer 3.11.11.806へ更新
【修正】
- マーカー検出ボタンが表示されない問題を修正
- 別のPCで作成されたプロジェクトファイルの読み込みに関する問題を修正
- インストーラーに含まれるFLIR SDKのバージョンに関する問題を修正
|
Ver 3.1.19
2025-05-26 |
主な更新内容
【追加】
- VideoExtensometer(VEX)製品向けライセンスに対応
- J-PRI製AOSカメラに対応
【変更】
- Examples Browser内のサンプルを更新
- FLIR Spinnakerカメラ用ドライバーをVer 4.0.0.116へ更新
- FlyCapture FLIRカメラのサポートを終了
【修正】
- 継続的インテグレーションに関する問題を修正
- CSVエクスポート時のUTF-8対応を修正
- 古いソフトウェアバージョンで作成された2Dプロジェクトの読み込みを修正
- VibrographyのGUIを改善
- GUIの軽微な問題を改善
- 中国語文字を含む動画エクスポートの問題を修正
- Polylineの長さ設定に関する問題を修正
|
Ver 3.1.7
2024-10-15 |
主な更新内容
【追加】
- ステレオシーン(3D)で、Line、Polyline、Chain Probeの長さをコンテキストメニューから変更できる機能を追加
- Neck Probeで試験機のつかみ具を検出し、検出結果に応じてNeck Probeを延長できる機能を追加
【変更】
- FLIR Spinnakerカメラ用ドライバーをVer 3.2.0.57へ更新
- Baslerカメラ用ドライバーをVer 7.4.0.38864へ更新
- Ximeaカメラ用ドライバーをVer 4.28.0へ更新
- License Requestダイアログで、リクエストの保存とメール送信ができるように変更
- AVT、Matrix Vision、Sentech、Evercam、PTP Devicesカメラのサポートを終了
- .NET FrameworkをVer 4.8.1へ更新
|
Ver 3.1.1
2024-04-12 |
主な更新内容
【修正】
- Vibrography Toolのレイアウトを修正
- サイドメニューの表示および非表示に関する問題を修正
|
Ver 3.1.0
2024-03-21 |
主な更新内容
【追加】
- Thermal Areaでエリア内の温度を測定する機能を追加
- Torsion Probeでねじりを測定する機能を追加
- APIから3D上のProbeの全長を設定できる機能を追加
- APIからAUTOSHUTTERコマンドおよびLIVECAMERAコマンドを送信できる機能を追加
- モバイルアプリからAuto Shutterの設定とLive Cameraの開始・停止を行う機能を追加
- 3Dキャリブレーション中にキャリブレーショングリッドのパラメータを変更できる機能を追加
- 表示倍率が100%以外の場合のGUIスケーリングに対応
【変更】
- すべてのメニューを初期状態で折りたたむ仕様に変更
- テーマフォントの初期設定をArialへ変更
- Pattern Quality Evaluation Toolを初期状態で有効化
【修正】
- Graph Data Settingsダイアログが空になる問題を修正
- 日本語翻訳を修正
- 測定停止後にモバイルアプリでカメラ画像が表示されない問題を修正
- モバイルアプリのシャッタースピード設定を最適化
- GUIの軽微な問題を修正
- キャリブレーション中にPlane Offsetへ負の値を設定できるように修正
|
Ver 3.0.12
2023-12-02 |
主な更新内容
【追加】
- Chain ProbeのセグメントをProbe全体に分布させる機能を追加
- Chain Probeの開始点と終了点を固定する機能を追加
- APIからChain Probeの全長を変更する機能を追加
- 日本語翻訳を追加
- APIコマンドSUBSCRIBEで測定データを自動受信できる機能を追加
【変更】
- FLIR Spinnakerカメラ用ドライバーをVer 3.1.0.79へ更新
【修正】
- Output Data SettingsメニューからAPI Adapterを設定できない問題を修正
- 中国語翻訳を修正
- 2DシーンでのCalliper Toolの問題を修正
- Windows 11でダークテーマ使用時に例外が発生する問題を修正
|
Ver 3.0.10
2023-09-22 |
主な更新内容
【追加】
- 複数のPlane Offsetを作成できる機能を追加
- HASPアップデーター用GUIを追加
- Chain Probeの端点を固定する機能を追加
- Chain ProbeおよびPolyline Probeのセグメントを指定する機能を追加
- レーザーポインターの検出機能を追加
- 制限付きアクセスUIでは、プロジェクトのロック解除を許可しない仕様を追加
【変更】
- Phantomカメラ用ライブラリを更新し、新しいPhantomカメラに対応
- 周期値送信用のAPI Adapter出力形式を変更
【修正】
- GUIの機能改善および不具合を修正
- モバイルアプリのライセンスに関する問題を修正
- 中国語使用時にクラッシュする問題を修正
|
Ver 3.0.0
2023-04-03 |
主な更新内容
【追加】
- 新しいグラフィカルユーザーインターフェースを追加し、ライトテーマとダークテーマに対応
- 接続カメラの映像プレビューとMercury RT機能の制御ができるモバイルアプリを追加
- Infratecサーマルカメラに対応
- Basler Ace 2モデルに対応
|
Ver 2.9.61
2023-03-01 |
主な更新内容
【追加】
- キャリブレーション中の自動画像取得機能を追加
- API Adapterをアプリケーション本体に統合
【修正】
- サンプルプロジェクトのダウンロード時に末尾のスラッシュが不足する問題を修正
- 参照フレーム設定後に新規プロジェクトを作成するとOutOfRangeExceptionが発生する問題を修正
- AOSカメラの画像を復調する際に発生するArgumentExceptionを適切に処理するよう修正
- Area Section Toolが無効化される問題を修正
|
Ver 2.9.55
2022-12-01 |
主な更新内容
【追加】
- Scale Calliper Toolで、モノシーンにおいて座標グリッドなしでスケール係数を設定できる機能を追加
- APIからPlane Offsetを設定できる機能を追加
- APIからProbeの全長を設定できる機能を追加
- APIから特定のProbeに対して長さ、全長、幅を設定できる機能を追加
- 外部APIからMercury RTの制御と結果取得を行うための、独立したAPI Adapterアプリケーションとの連携を追加
- 最新のBaslerカメラドライバーVer 7.2.1に対応
【変更】
- ライセンスモジュールをBASIC、2D、3Dへ変更
- Polyline ProbeのLengthをGauge Lengthへ変更
- グラフの説明表記を「Y-axis vs. X-axis」形式へ変更
- ブランド表記をMercury MS, s.r.o.へ変更
- HASP Key保護の表記をMercury MS, s.r.o.へ変更
- インストーラーの軽微な変更を実施
【修正】
- Probeのサイズ変更時に固定点が正しく固定されるよう修正
- Version CheckerがMercury RTの新バージョンを正しく確認するよう修正
- サンプルおよびドライバーを正しいサイトからダウンロードするよう修正
- プロジェクトを開く際にnullオブジェクトを正しく処理するよう修正
|
Ver 2.9.42
2022-05-20 |
主な更新内容
【修正】
- 特定の条件でInclude Area ToolおよびExclude Area Toolを使用した際にクラッシュする問題を修正
|
Ver 2.9.41
2022-05-16 |
主な更新内容
【修正】
- License Requestダイアログのレイアウトを変更
|
Ver 2.9.40
2022-05-11 |
主な更新内容
【修正】
- Vector Densityパラメータを矢印で変更した際にクラッシュする問題を修正
- プロジェクトの再計算中に未処理の例外が発生する問題を修正
- 新しいグラフの確定時にGraph Configuratorがクラッシュする問題を修正
- Probe削除時に応答しなくなる問題を修正
- 再計算開始時にComputation Parametersをログへ出力するよう修正
|
Ver 2.9.36
2022-03-12 |
主な更新内容
【修正】
- 試験機向けの64bit版インストーラーでライブラリが不足している問題を修正
|
Ver 2.9.35
2022-03-02 |
主な更新内容
|
Ver 2.9.34
2022-02-03 |
主な更新内容
【修正】
- 新しいXimeaカメラ向けにドライバーおよびAPIを更新
|
産業用カメラスペック
| 名称 |
5Mピクセルカメラ |
12Mピクセルカメラ |
24Mピクセルカメラ |
| 解像度 |
2,448 x 2,048ピクセル |
4,096 x 3,000ピクセル |
5,328 x 4,608ピクセル |
| フレームレート |
75fps |
30fps |
15fps |
| シャッター |
グローバルシャッター |
| # |
センサー情報(EMVA)
|
| 量子効率 |
65.8 % |
66.8 % |
66.3 % |
| ダークノイズ |
2.5 e¯ |
2.5 e¯ |
2.2 e¯ |
| 飽和容量 |
9.9 ke¯ |
9.9 ke¯ |
9.7 ke¯ |
| ダイナミックレンジ |
70.1 dB |
70.2 dB |
70.7 dB |
| S/N比 |
39.9 dB |
40 dB |
39.9 dB |
ハイスピードカメラ スペック
特におすすめのハイスピードカメラです。これ以外にも様々ご提案が可能です。
| 名称 |
Phantom T2540 |
Phantom VEO1310 |
Phantom C321 |
| |
|

|

|
| 解像度 |
2,560×1,664ピクセル |
1,280 x 960ピクセル |
1,920 x 1,080ピクセル |
| フレームレート |
9,350fps |
10,860fps |
1,480fps |
| シャッター |
グローバルシャッター |
| # |
センサー情報(EMVA)
|
| 量子効率 |
85.4% |
71.6% |
45.3% |
| ダークノイズ |
23.7 e- |
13.65 e- |
14.55 e¯ |
| 飽和容量 |
9703 ke¯ |
11700 ke¯ |
5501 ke¯ |
| ダイナミックレンジ |
52.0 dB |
58.3 dB |
51.2 dB |
| S/N比 |
39.9 dB |
40.7 dB |
37.4 dB |

DIC(デジタル画像相関法)を使った撮影や技術質問は、お気軽にご相談ください。

機材の詳細なスペックや使用事例は、PDFの資料でもご覧になれます。
お電話でのお問い合わせ
03-3443-2633
受付時間 9:00~18:00(土日・祝日除く)