流体解析ソフトウェア PIV
PIVとは粒子イメージ流速計測法(Particle Image Velocimetry)の略で、非接触で2次元断面中の速度分布を計測する手法です。可視化された計測空間から画像処理により数多くの計測点で速度と方向を同時に算出するので、流速計よりも空間構造が把握しやすい点が特徴です。また流速が極めて遅い場合にも対応できます。
微小時間差をもって記録された2つの画像の粒子群の移動量の差からベクトル(速度・角度)を計算することができます。
PIVの映像事例
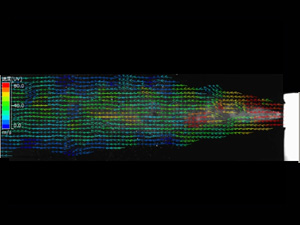
角柱周りの気流の流れ可視化
角柱にシート状のレーザー光源を照射し、流れの中にトレーサーとなる粒子を流し高速度カメラで撮影することによって気流の可視化を行い、取得した画像を用いてPIV解析を行いました。解析結果を見てみると左から右に向かって流れる気流が角柱にぶつかるところで流れが変わり渦状に乱流となっているのがわかります。
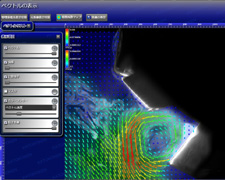
共焦点顕微鏡におけるマイクロ流路の高解像度撮影
共焦点顕微鏡下でのマイクロ流路の様子をハイスピードカメラPhantomv2640で撮影を行いました。高解像度1664x1000で990fpsで撮影し、PIV解析も行うことができています。
ハイスピードカメラによる空気砲のPIV解析
空気砲での気流の可視化を行いました。
空気の挙動はカメラでは見えませんので、トレーサと呼ばれる煙を散布します。
レーザシート光源を照射してトレーサ粒子に反射させることでハイスピードカメラで撮影できます。
通常撮影では暗かったため、カメラのゲインを8倍に上げましたが、誤ベクトルなくPIV解析ができています。
PIVの主な用途
PIVは、気体や液体の流れを可視化する手法として、以下のような用途で主に使用されています。
- 風洞空力実験の車両・航空機周りの流れ
- 装置内の流れ(冷却効果)
- 室内環境や家電製品などの空調関係
- 河川・海岸工学・環境水理
- 人工血流、呼吸器モデルなどの医療関係
- 竜巻、ヒートアイランドなどの耐風・風工学
システム構成

レーザー光源
可視化用レーザシート光源を、流れ場中に混入されたトレーサ粒子に照射します。

ハイスピードカメラ
最新のハイスピードカメラの飛躍的な性能向上により、露光時間を短くし、鮮明な画像を 数m/sec~ 数μ/sec間隔で動画として取り込むことが可能です。
流体解析ソフトウェア
微小時間差をもって記録された2つの画像の粒子群の移動量の差からベクトル(速度・角度)を計算することができます。
煙発生器
気体の流れ場のマーカーとなるスモークや液体用のマーカーであるトレーサー粒子など様々な種類から選択できます。
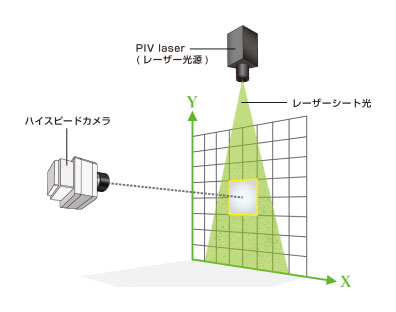
システム構成図
計測したい空間にトレーサー(煙や蛍光粒子)を充満させます。この時、気体であれば煙発生機を使用、液体であれば蛍光粒子を混ぜるなどの手法が用いられます。液相用トレーサには粒径数μm~数10μmの粉末粒子を、気相用トレーサには専用の煙を用います。
その後、流れを可視化したい平面にレーザーシート光を照射します。
これにより、レーザーシート光が当たっている2次元平面上にあるトレーサーにレーザー光が反射します。
そのトレーサーをハイスピードカメラで撮影し、流体解析ソフトウェアで追尾することで流れを算出します。
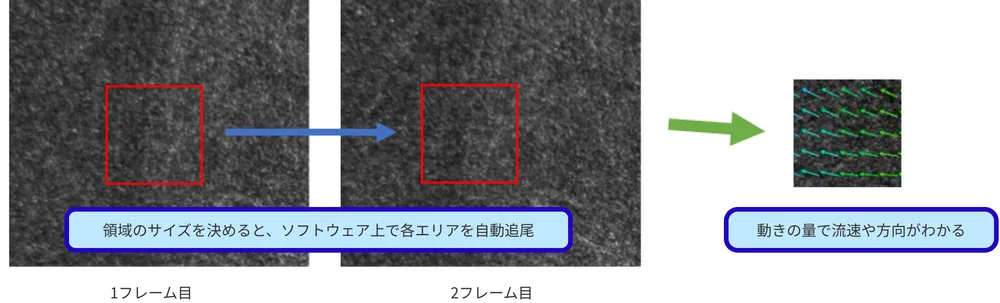
PIVで画像から速度分布を算出する原理
ハイスピードカメラで撮影された粒子画像をPIVソフトウェアで解析します。
ベクトルの算出方法としては微小時間差をもって記録された2つの画像の粒子群の移動量の差からベクトル(速さ・向き)を算出することができます。
ベクトルの他、流線、流脈線、乱流エネルギー等のアウトプットが可能です。
PIVの利点・欠点
利点
- 非接触で計測ができる
- 面で計測できる
- 再現性がある
- 3次元での計測も可能
欠点
- トレーサ粒子が必要
- カメラに写らない部分は計測ができない
- レーザー光が眼球に入らないように保護、警告を設ける必要がある
流体計測PIVにおけるカメラの選び方 4つのポイント
撮影速度(フレームレート)
PIVのフレームレート算出方法
トレーサーの移動量が1フレーム後に5~10ピクセル程度にすると精度良くPIV解析できます。
仮に5ピクセルで最適なフレームレートを計算すると、
流速(m/s)÷1フレームの移動量(m)÷5(ピクセル)
で求められます。
流速10m/s、視野1000mmx1000mm、カメラ解像度1000x1000の場合、
1ピクセルが1mmですので、
10(m/s)÷0.001(m)÷ 5 = 2,000fps
となります。
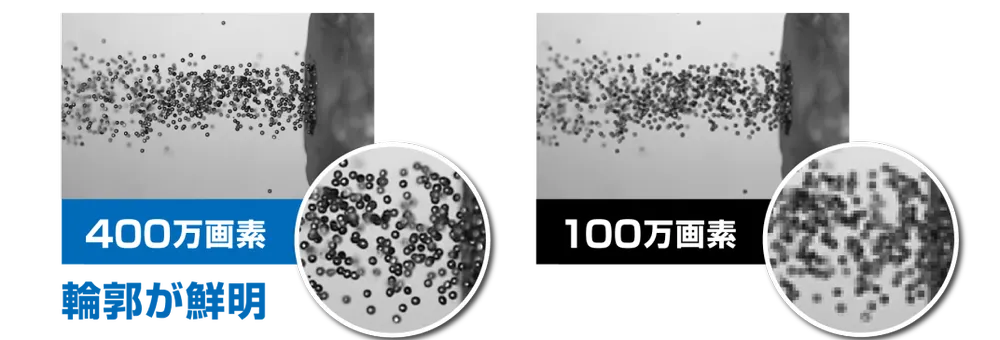
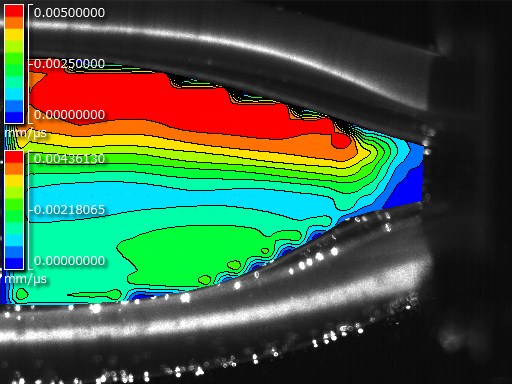
画素数
高解像度なカメラを使用することで、局所的な変位も解析することが可能になります。
また、1ピクセルを処理でさらに分割して細かいピクセルとするサブピクセル処理を行えば、実質的な空間分解能が上がります。
以下の画像は、400万画素と100万画素のカメラで比較したものです。
画像が明らかに鮮明なだけでなく、PIVの結果も精度の違いとして現れます。
センサーノイズ
PIV解析では輝度情報が重要になるため、ノイズに埋もれてしまうと精度が低くなってしまいます。 低ノイズなセンサーを搭載したカメラを使用することでノイズによる誤ベクトルの検出を抑えることができます。 センサーノイズを減らすには、画像などのソフトウェア処理と、センサーそのものを冷却するなどのハードウェア処理の2つがあります。
またハイスピードカメラPhantomには、低ノイズを実現するCDS機能を搭載したモデルがあり、PIVに推奨しています。
ダイナミックレンジ
PIV解析では粒子を最適な輝度値で撮影する必要があります。従って、輝度が飽和しないことかつ黒に埋もれないことが重要です。ダイナミックレンジの狭いカメラでは、レーザシート光源を当てた粒子が簡単に飽和してしまい、光源やカメラを調整しても粒子が黒に埋もれてしまいます。その結果、調整が困難なだけでなくPIV解析が難しくなります。Phantomはダイナミックレンジに優れ、高精細なPIV計測を実現します。
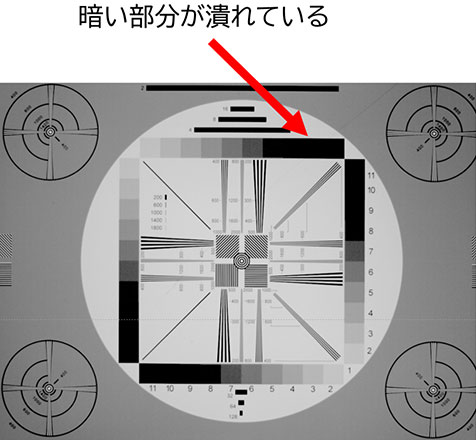
ダイナミックレンジが狭い
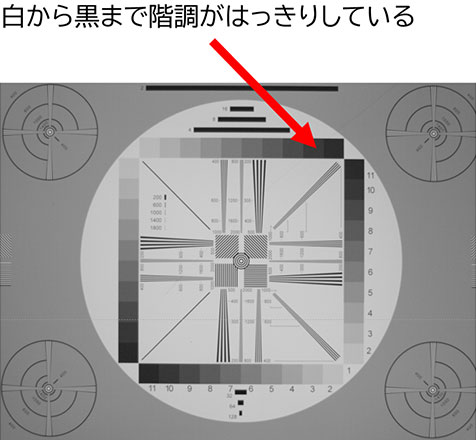
ダイナミックレンジが広い
流体解析PIVに最適なカメラ機種
ハイスピードカメラPhantomは多彩なラインナップが特徴ですが、なかでもPhantom VEO 1310とPhantom T3610がおすすめです。
低ノイズx高ダイナミックレンジで高精度PIVを実現! Phantom VEO1310

VEO1310は、バックグラウンドノイズを除去するCDS機能を搭載で、高感度(モノクロISO8万)ながら超低ノイズを実現。
ダイナミックレンジが広く、照明の調整が簡便になります。
幅広い速度レンジで流れ場の計測に役立ちます。
高速・高感度x高ダイナミックレンジで高速流れ場のPIVをサポート!Phantom T3610

T3610はコンパクトな小型・軽量ボディながらISO感度12.5万(モノクロ)の高感度センサを搭載。
1280x800ピクセル時に3.8万fps、640x384ピクセル時に15万fps。
ダイナミックレンジが広く、これまで難しかった高速な流れ場でのPIV解析を実現できます。
解析項目

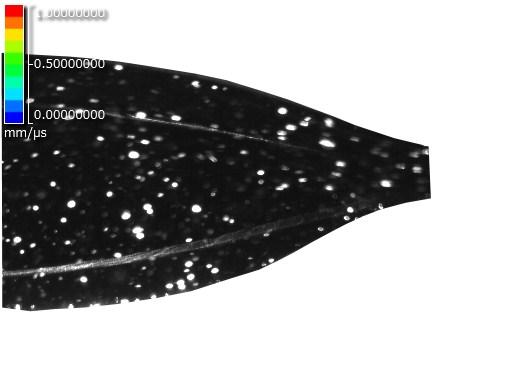
元画像
マスク画像
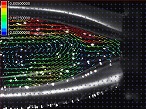
速度ベクトル
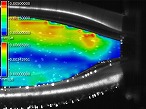
カラーコンター
流線算出
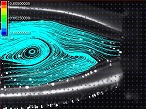
渦度算出
乱流エネルギー
速度標準偏差
解析ソフトウェア主仕様
| 測定項目 | 2次元2成分PIV、2次元2成分PTV | |
| 計算方式※ | PIV | 直接相互相関法、再帰的相関法、全画像変形、 アンサンブル相関法、CBC |
| PTV | 2値化相関法 | |
| キャリブレーション | 画像距離指定、2次射影変換、校正版使用 | |
| ベクトル項目 | XY合成、X、Y、相関係数、平均 | |
| 解析項目 | 流線、流脈線、流跡線、渦度、速度勾配テンソル、乱流エネルギー、レイノルズ応力、速度標準偏差 | |
| 計測点CSV出力 | 速度(X、Y、XY合成)、渦度、速度勾配テンソル、乱流エネルギー、レイノルズ応力 | |
| グラフ表示 | 指定ポイント、ライン、エリア(移動距離、速度) | |
| 画像処理機能 | 各種フィルター、画像演算、画像間演算、輝度補正、凸部検出 | |
| 誤ベクトル修正 | 8近傍平均値閾値削除、8近傍中央値閾値削除、輝度標準偏差削除、平均輝度値閾値削除、相関係数閾値削除 | |
| 対応画像フォーマット | AVI、WMV、JPG、BMP、TIFF、PNG連番 | |
| データフォーマット | プロジェクト形式、CSV形式 | |
| 対応OS | WindowsXP SP3、Vista、Windows7(32bit及び64bit) | |
| ※・・・マルチスレッド処理(SSE3)により高速演算が可能となりました。 | ||
PIVならノビテックにご相談ください
ノビテックでは、画像計測のプロフェッショナルがお客様のお悩みを解決する総合提案をいたします。まずはお打ち合わせから、お気軽にお問い合わせください。
流体解析PIVの最新事例
磁石に引き寄せられる砂鉄の挙動
砂鉄や磁粉は、工業分野の品質管理から身近な電気製品、さらには伝統的な工芸品まで、多岐にわたる環境でそ...
400万画素ハイスピードカメラとPIVで中層海域の生物を研究
事例概要 中層海域生物の研究と課題 モントレー湾水族館研究所の科学者たちは、そこに広がる中層海域の謎...
霧吹きによる噴霧の様子を可視化
霧吹きによる噴霧の様子をハイスピードカメラ T3610 を用いて可視化しました。 日常生活で度々使用...
Category Menu
製品カテゴリー
