ひずみ解析(DIC)ソフトウェア Mercury RT
Mercury RTとは
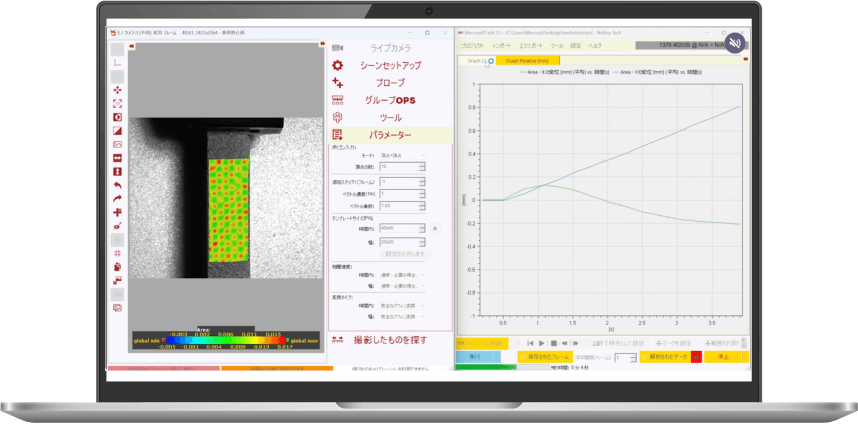
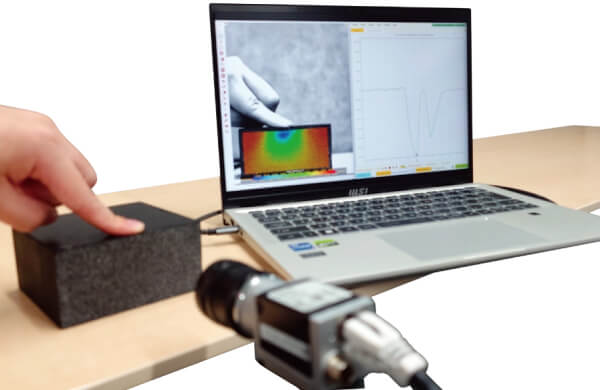
Mercury RTはデジタルカメラで撮影された変形前後の画像からDIC(デジタル画像相関法)によって非接触でひずみ分布の解析を行うソフトウェアです。
新製品の開発、CAEシミュレーションとの比較、そのほか様々な材料強度の評価試験に最適です。
従来のひずみ計測との違い
従来の方法
- 計測に時間がかかる
- 接触による影響が避けられない
- 複雑な形式の測定が困難
- 測定点が限られる
Mercury RT
- 短時間での計測が可能
- 非接触で正確な測定
- あらゆる形状に対応
- 全視野の変形を測定可能
Mercury RTの特徴
用途に合わせて最適なご提案から、納入後のアフターフォローまで行うので安心してご利用いただけます。
画像からひずみを算出

最適なカメラを
提供可能

適切なセッティングを
Mercury RTが判別

機能
主要機能①
豊富な解析項目
Mercury RTは各主ひずみに加え、一軸方向ひずみ、せん断、ひずみ速度、変位など様々な解析項目を搭載しています。
これによりシミュレーションや理論上の数値と、実際の現象の比較が可能です。
| 解析項目 | 内容 |
| Displacement[mm] | 変位 |
| Displacement in X[mm] | 変位X |
| Displacement in Y[mm] | 変位Y |
| Strain E1[-] | 最大主ひずみ |
| Strain E2[-] | 最小主ひずみ |
| Strain EXX[-] | 一軸方向ひずみX |
| Strain EYY[-] | 一軸方向ひずみY |
| Strain EXY[-] | せん断ひずみ |
| Strain E1 Rate[-/s] | 最大主ひずみ速度 |
| Strain E2 Rate[-/s] | 最小主ひずみ速度 |
| StDev[mm] | 標準偏差 |
| StDev in X[mm] | 標準偏差X |
| StDev in Y[mm] | 標準偏差Y |
※クリックしてご覧ください。
主要機能②
プローブ機能
Mercury RTでは、試料の変形や動きを高精度で計測するために、仮想のプローブを使用することができます。
シンプルな2点間距離や、ポアソン比、塑性ひずみ、仮想ひずみゲージなど様々な機能があります。
※画像をクリックすると拡大表示できます。

Point Probe
2D
3D
選択した点の位置と変位を測定します。

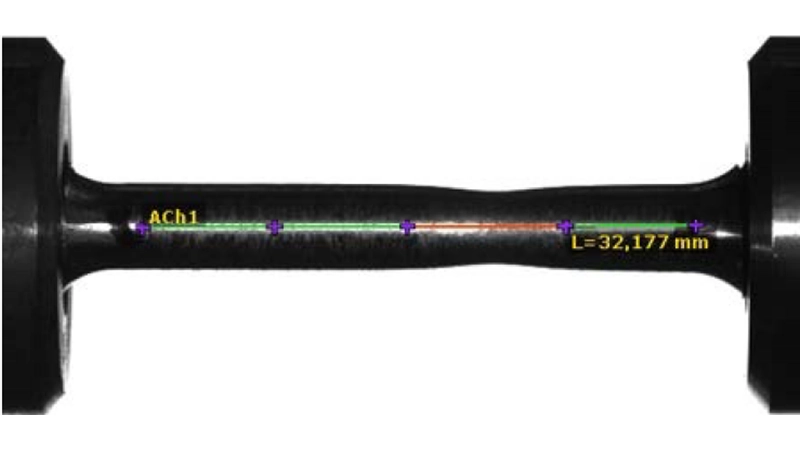
Line Probe
2D
3D
測定試料の2点間の距離(Line Probeの長さ)を測定します。
Chain Probe
2D
3D
Lineを複数セグメントに分割し、伸びが最も高い

Force Gauge
2D
3D
時間の経過に伴うForce Gaugeのノビテックと指定された剛体から応力と真応力を計算します。

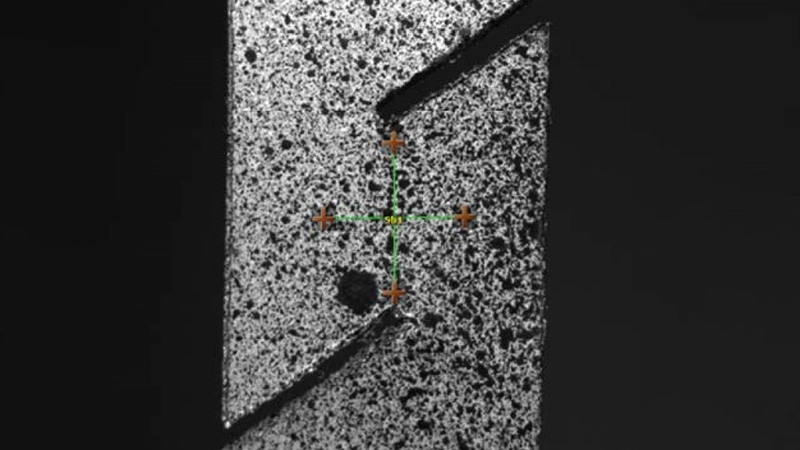
Neck Gauge
2D
3D
引張試験中に発生するネックを検出できるほか、ポアソン比や塑性ひずみ比を計算します。
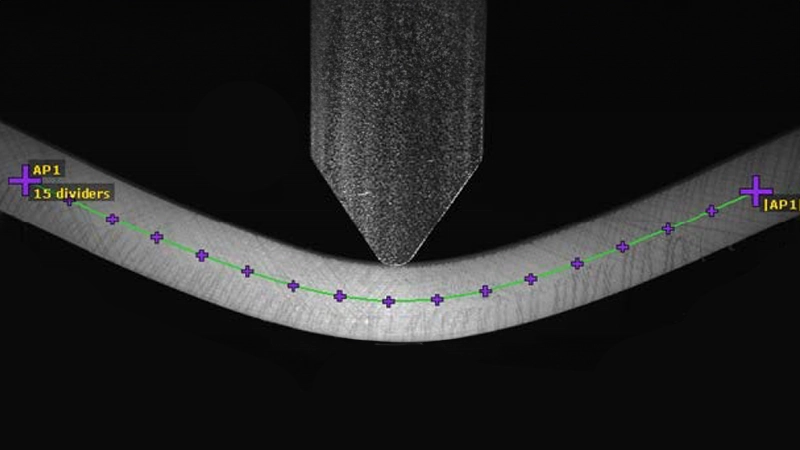
Polyline Probe
2D
3D
変形後の非直線物体の全長を測定し、曲げカンチレバー(片持ち梁)の最大たわみを計算。
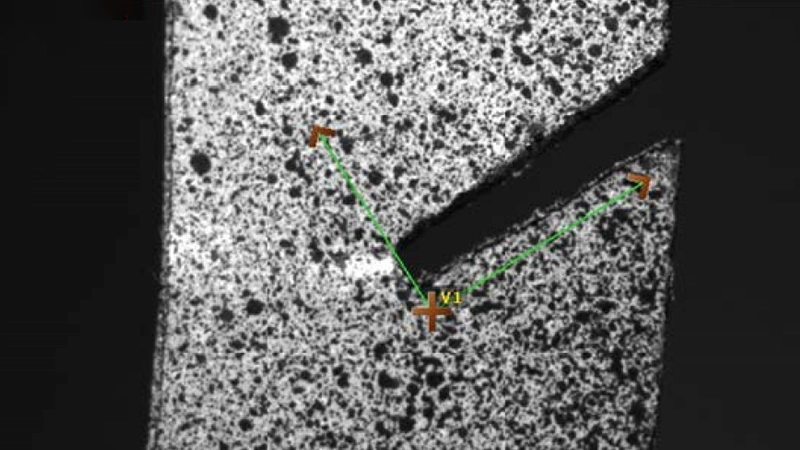
Shear Probe
2D
交差する2線間の角度や、せん断ひずみを計算します。

Rigid Plane Probe
2D
時間経過に伴う座標系の動きを計算します。
Angle Probe
2D
共有の開始点をもつ2線間の角度や関連する値を計
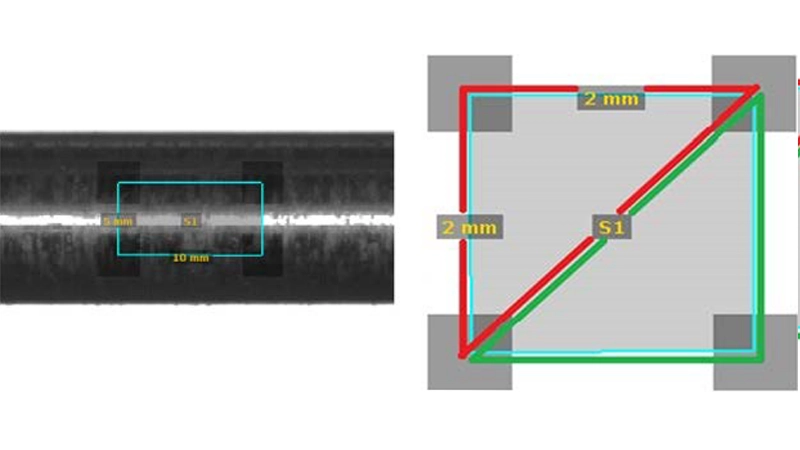
Strain Gauge
2D
仮想ゲージを用いてひずみ(または変形)テンソルおよびポアソン比の評価を行います。
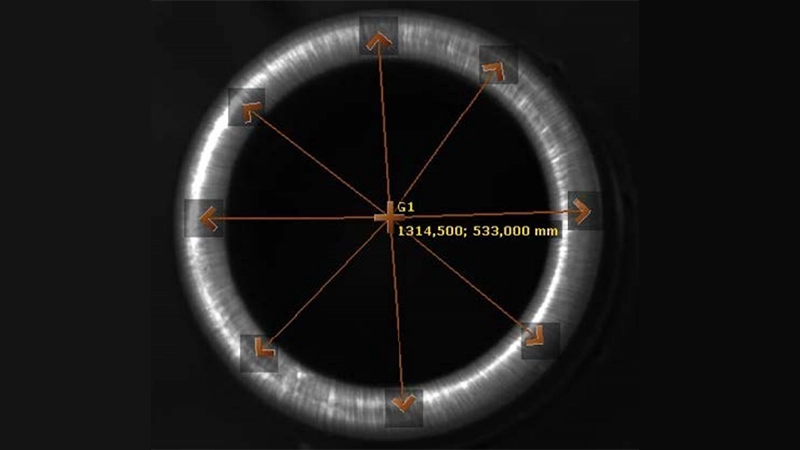
Point Group
3D
測定された標本の回転の変化など、点のグループ全体に関する値を計算します。
Surface
3D
追跡プローブ間の空間関係を視覚化し、3Dビューに視覚情報を追加します。
※クリックしてご覧ください。
主要機能③
ソフトウェア上でカメラ制御

Mercury RTはハイスピードカメラPhantom、各種産業用カメラの制御に対応しています。
Mercury RTのソフトウェアからカメラをコントロールし、撮影から解析までを同一ソフトウェア上で行うことができます。
これにより、ソフトウェアを行き来する手間が省けます。
主要機能④
リアルタイム計測
Mercury RTのリアルタイム計測機能は、物体や材料の動的な挙動をリアルタイムで捉え、分析するための強力なツールです。
この機能は物体の動きや変形を瞬時に計測し、そのデータをリアルタイムで処理・表示します。
これにより、材料の応力試験、構造物の振動分析、製品の品質検査など、試験前の相関を確認する事前テストなど多岐にわたる用途での活用ができます。
※対応する産業用カメラが必要です。
Mercury RTのデモ体験
Mercuryの優れた機能を、ぜひオンラインデモで体験してください。
登録不要、クリックするだけで体験できます。
価格
Mercury RTソフトウェアは基本パッケージ買い切りです。価格は予告なく変更される場合がございます。
Mercury RT 2D
本体価格
税抜135万円
- 2次元平面上の計測をすることができます。
- カメラ1台を使用するシステムなので、引張試験など平面上のひずみを見る際に最適です。
- リアルタイムデータ出力にも対応しています。
※3Dへのアップグレードが可能です
Mercury RT 3D
本体価格
税抜228万円
- 物体の3次元の変形やひずみを計測することが可能です。
- 曲面を持つ物体や回転体などを撮影する際に必要です。
- 3D版ソフトウェアでは、2D / 3D両方の計測が可能です。
必要な機材

カメラ
お客様のご要望に応じて選定いたします。
ゆっくり変形するものであれば産業用カメラ、破断や衝突などの高速な現象を計測する場合はハイスピードカメラが必要です。
解像度が高いほど細かく相関を見られるため、精度が高まります。
ひずみ解析ソフトウェア Mercury RT
デジタルカメラで撮影した画像を処理するのがひずみ解析ソフトウェアです。 変形前後の画像を使用しパターン群の変形を捜索、演算解析を行い、ひずみを可視化解析します。 解析したデータはcsv、動画、画像で出力可能です。

解析用PC
ひずみ解析ソフトウェアを動かすPCが必要になります。
【推奨スペック】
- CPU:Intel Core i7 以上
- メモリ:32GB 以上
- グラフィックボード:NVIDIA GeForce GTX1650 4GB 以上
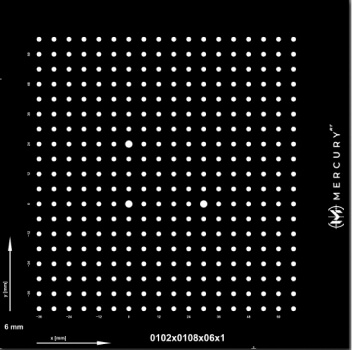
キャリブレータ
高精度な計測を行うためのパターンが描かれたプレートです。
- カメラレンズの歪み補正
- 2D測定の平面におけるピクセルと物理単位(ミリメートル)の設定
- 3D座標系の設定のために使用します。撮影領域に合わせて様々なサイズを取り揃えています。
よくある質問
DICの原理を教えてください。
DIC(デジタル画像相関法)では測定対象物にスペックルパターンと呼ばれるランダムな模様を塗布し、デジタルカメラで変形画像の撮影を行います。
撮影した変形画像から模様群の変位を探索し、その割合からひずみや変位量を解析します。
ソフトウェアの他に必要なものはどんなものがありますか?
ソフトウェアの他に必要なものとして、計測用カメラ、カメラレンズ、三脚、照明、解析用PC、キャリブレーターなどがあります。
お客様の測定条件、環境に合わせて最適なご提案をさせていただきますので、詳しくはお問合せください。
解析の精度はどの程度でしょうか?
DICによる画像解析では、カメラ解像度と測定視野におけるピクセルあたりの空間分解能が重要な要素をもっています。
例えば1,000x1,000ピクセルで100x100mmの視野を観察した場合の空間分解能は100μm/pixelとなりますので、少なくとも100μmの分解能での解析が実行できることになります。
Mercuryでは1ピクセルを更に詳細に解析を行うサブピクセル処理を行っていますので、100μm以下の微小な変形も解析することが可能になります。
お客様の測定対象に合わせて最適な計測カメラのご提案をさせていただきますので、詳しくはお問合せください。
複雑な形状の製品を扱っています、これらのひずみを解析することは可能ですか
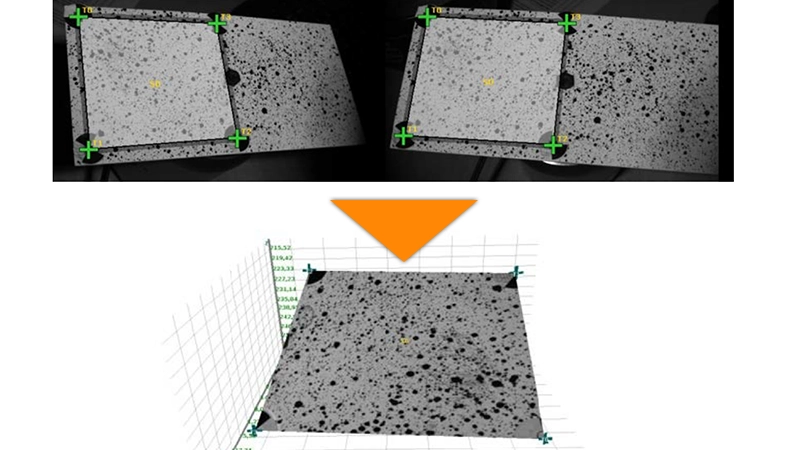
はい、Mercury3Dを使用すれば可能です。
Mercury3Dでは2台のカメラを用いてステレオ撮影を行うことで、共有する視野情報からキャリブレーションを行い、立体的な構造物や奥行への変形を含めた解析が可能になります。
お客様の測定対象に合わせて最適な計測システムをトータル提案させていただきます。詳しくはお問合せください。
振動試験によるひずみ特性の研究をしています、振動の解析もMercuryで行うことは可能でしょうか
はい、Mercuryの振動計測オプションを使用すれば可能です。
Mercuryでは基本的なひずみや変位解析のほかに、振動計測モジュールをオプションとして提供しています。
振動計測モジュールを用いることで、測定したデータからFFT解析を使った各種振動特性を詳細に分析することが可能になります。
お客様の求める測定周波数に応じて最適な計測カメラをご提案させていただきます、詳しくはお問合せください。
お問い合わせ
CONTACT
お電話でのお問い合わせ
03-3443-2633
受付時間 9:00~18:00(土日・祝日除く)