GEARS Setting ポイントクラウド設定
設定:Point Cloud(ポイントクラウド)
画面右下のGEARSアイコンをクリックし、メニューから「Settings(設定)」→「Point Cloud(ポイントクラウド)のアイコンをクリックします。
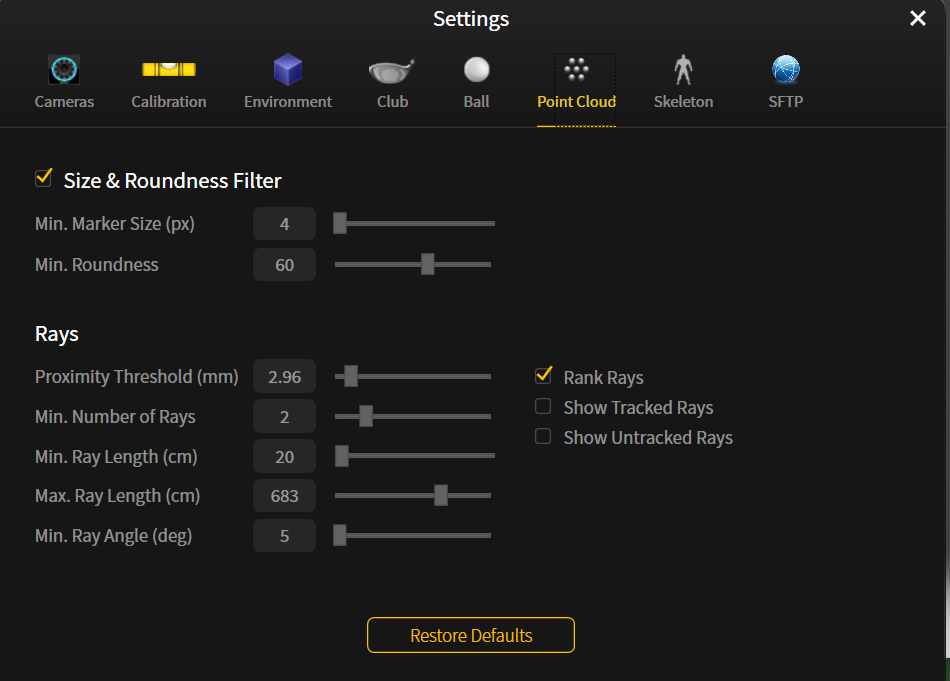
Size & Roundness Filter:サイズと丸みのフィルター
マーカーが部分的に隠れている場合やマーカーが完全に丸くない場合は、フィルタリングされます。
- Min. Marker Size (px):最小マーカーサイズ
見えなければならない最小のピクセル数。マーカーが遠すぎると、ピクセル数が少なくなり、フィルタリングされます。 - Min. Roundness:最小の丸み
100%の表示可能=完璧な丸
Rays:光線
各カメラから発せられる赤外線を表します。
- Proximity Threshold – distance two rays must be in order to count as an intersection.
近接しきい値 -2つの光線が交差としてカウントされるために必要な距離 - Min. Number of Rays – the number of cameras that each marker must be seen by to capture its position.
最小の光線数 -各マーカーがその位置を捉えるために必要なカメラの数 - Min. Ray Length – the shortest ray that can detect a marker.
最小の光線の長さ -マーカーを検出できる最短の光線 - Max. Ray Length – the longest ray length that can detect a marker.
最長の光線の長さ -マーカーを検出できる最長の光線の長さ - Min. Ray Angle – the two rays that intersect must be greater than or equal to this value.
最小の光線の角度 -交差する2つの光線がこの値以上であること - Rank Rays – rays that are close to the 3D marker center are given more weight than rays further away. This create a ranking system whereby GEARS utilizes the closer rays for a more accurate capture.
ランク付けされた光線 -3Dマーカーの中心に近い光線は、離れた光線よりも重視されます。これは、GEARSがより正確なキャプチャのために近い光線を利用するランキングシステムを作成します - Show Tracked Rays – shows (in green) all the rays that are making it passed the set thresholds.
追跡された光線を表示 -設定したしきい値を通過したすべての光線を緑色で表示します - Show Untracked Rays – shows (in red) all the rays that did not make it passed the set thresholds.
追跡されなかった光線を表示 - 設定されたしきい値を通過できなかったすべての光線を(赤で)表示します